Diffusion 2D Unconditional Example#
![]()
This notebook demonstrates how to train and sample from a diffusion model on a 2D toy dataset using JAX and Flax. We will cover data generation, model definition, training, sampling, and visualization.
1. Environment Setup#
In this section, we set up the notebook environment, import required libraries, and configure JAX for CPU or GPU usage.
[31]:
# Load autoreload extension for development convenience
%load_ext autoreload
%autoreload 2
The autoreload extension is already loaded. To reload it, use:
%reload_ext autoreload
[32]:
try: #check if we are using colab, if so install all the required software
import google.colab
colab=True
except:
colab=False
[ ]:
if colab: # you may have to restart the runtime after installing the packages
%pip install "gensbi_examples[cuda12] @ git+https://github.com/aurelio-amerio/GenSBI-examples"
!git clone https://github.com/aurelio-amerio/GenSBI-examples
%cd GenSBI-examples/examples
[3]:
# Set training and model restoration flags
overwrite_model=False
restore_model=True
train_model=False
[4]:
# Import libraries and set JAX backend
import os
os.environ['JAX_PLATFORMS']="cuda" # select cpu instead if no gpu is available
# os.environ['JAX_PLATFORMS']="cpu"
import sys
sys.path.append("./src")
from flax import nnx
import jax
import jax.numpy as jnp
import optax
from optax.contrib import reduce_on_plateau
import numpy as np
# Visualization libraries
import matplotlib.pyplot as plt
from matplotlib import cm
import time
import diffrax
import grain.python as grain
[5]:
# Setup checkpoint directory and JAX sharding mesh
import orbax.checkpoint as ocp
pwd = os.getcwd()
checkpoint_dir = f"{pwd}/checkpoints/diffusion_2d_example"
os.makedirs(checkpoint_dir, exist_ok=True)
if overwrite_model:
checkpoint_dir = ocp.test_utils.erase_and_create_empty(checkpoint_dir)
# Define the mesh for JAX sharding (for model restoration on CPU/GPU)
devices = jax.devices()
mesh = jax.sharding.Mesh(devices, axis_names=('data',)) # A simple 1D mesh
2. Data Generation#
We generate a synthetic 2D dataset using JAX. This section defines the data generation functions and visualizes the data distribution.
[6]:
# Define data generation functions for moons and boxes datasets
import jax
import jax.numpy as jnp
from jax import random
from functools import partial
@partial(jax.jit, static_argnums=[1,2,3]) # type: ignore
def make_moons_jax(key, n_samples=100, shuffle=True, noise=None):
"""Make two interleaving half circles using JAX.
Args:
n_samples: The total number of points generated.
shuffle: Whether to shuffle the samples.
noise: Standard deviation of Gaussian noise added to the data.
random_state: A JAX random.PRNGKey for reproducibility.
Returns:
X: A JAX array of shape (n_samples, 2) containing the generated samples.
y: A JAX array of shape (n_samples,) containing the integer labels (0 or 1)
for class membership of each sample.
"""
n_samples_out = n_samples // 2
n_samples_in = n_samples - n_samples_out
# Generate points for the outer moon (label 0)
outer_circ_t = random.uniform(key, shape=(n_samples_out,)) * jnp.pi
key, subkey = random.split(key)
outer_circ_x = jnp.cos(outer_circ_t)
outer_circ_y = jnp.sin(outer_circ_t)
X_outer = jnp.vstack([outer_circ_x, outer_circ_y]).T
# Generate points for the inner moon (label 1)
inner_circ_t = random.uniform(subkey, shape=(n_samples_in,)) * jnp.pi
key, subkey = random.split(key)
inner_circ_x = 1 - jnp.cos(inner_circ_t)
inner_circ_y = 0.5 - jnp.sin(inner_circ_t)
X_inner = jnp.vstack([inner_circ_x, inner_circ_y]).T
# Combine the moons
X = jnp.vstack([X_outer, X_inner])
y = jnp.hstack([jnp.zeros(n_samples_out, dtype=jnp.int32), jnp.ones(n_samples_in, dtype=jnp.int32)])
if noise is not None:
# Add Gaussian noise
key, subkey = random.split(key)
X += random.normal(subkey, shape=X.shape) * noise
if shuffle:
# Shuffle the data
key, subkey = random.split(key)
permutation = random.permutation(subkey, n_samples)
X = X[permutation]
y = y[permutation]
return X, y
@partial(jax.jit, static_argnums=[1]) # type: ignore
def make_boxes_jax(key, batch_size: int = 200):
"""
Generates a batch of 2D data points similar to the original PyTorch function
using JAX.
Args:
key: A JAX PRNG key for random number generation.
batch_size: The number of data points to generate.
Returns:
A JAX array of shape (batch_size, 2) with generated data,
with dtype float32.
"""
# Split the key for different random operations
keys = jax.random.split(key, 3)
x1 = jax.random.uniform(keys[0],batch_size) * 4 - 2
x2_ = jax.random.uniform(keys[1],batch_size) - jax.random.randint(keys[2], batch_size, 0,2) * 2
x2 = x2_ + (jnp.floor(x1) % 2)
data = 1.0 * jnp.concatenate([x1[:, None], x2[:, None]], axis=1) / 0.45
return data
[7]:
# Infinite data generator for training batches
@partial(jax.jit, static_argnums=[1]) # type: ignore
def inf_train_gen(key, batch_size: int = 200):
x = make_boxes_jax(key, batch_size)
return x
[8]:
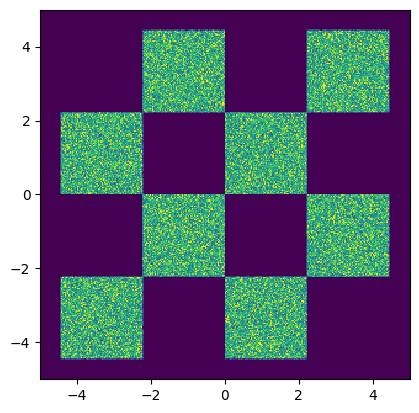
# Visualize the generated data distribution
samples = np.array(inf_train_gen(jax.random.PRNGKey(0), 500_000))
H=plt.hist2d(samples[:,0], samples[:,1], 300, range=((-5,5), (-5,5)))
cmin = 0.0
cmax = jnp.quantile(jnp.array(H[0]), 0.99).item()
norm = cm.colors.Normalize(vmax=cmax, vmin=cmin)
_ = plt.hist2d(samples[:,0], samples[:,1], 300, range=((-5,5), (-5,5)), norm=norm, cmap="viridis")
# set equal ratio of axes
plt.gca().set_aspect('equal', adjustable='box')
plt.show()
3. Model and Loss Definition#
We define the score model (an MLP), the loss function, and the optimizer for training the diffusion model.
[40]:
# Import diffusion model components and utilities
from gensbi.utils.model_wrapping import ModelWrapper
from gensbi.diffusion.path import EDMPath
from gensbi.diffusion.path.scheduler import EDMScheduler
from gensbi.diffusion.solver import SDESolver
[41]:
# Define the MLP score model
class MLP(nnx.Module):
def __init__(self, input_dim: int = 2, hidden_dim: int = 128, *, rngs: nnx.Rngs):
self.input_dim = input_dim
self.hidden_dim = hidden_dim
din = input_dim + 1
self.linear1 = nnx.Linear(din, self.hidden_dim, rngs=rngs)
self.linear2 = nnx.Linear(self.hidden_dim, self.hidden_dim, rngs=rngs)
self.linear3 = nnx.Linear(self.hidden_dim, self.hidden_dim, rngs=rngs)
self.linear4 = nnx.Linear(self.hidden_dim, self.hidden_dim, rngs=rngs)
self.linear5 = nnx.Linear(self.hidden_dim, self.input_dim, rngs=rngs)
def __call__(self, x: jax.Array, t: jax.Array):
x = jnp.atleast_2d(x)
t = jnp.atleast_1d(t)
if len(t.shape)<2:
t = t[..., None]
t = jnp.broadcast_to(t, (x.shape[0], t.shape[-1]))
h = jnp.concatenate([x, t], axis=-1)
x = self.linear1(h)
x = jax.nn.gelu(x)
x = self.linear2(x)
x = jax.nn.gelu(x)
x = self.linear3(x)
x = jax.nn.gelu(x)
x = self.linear4(x)
x = jax.nn.gelu(x)
x = self.linear5(x)
return x
[42]:
# Initialize the score model
hidden_dim = 512
F_model = MLP(input_dim=2, hidden_dim=hidden_dim, rngs=nnx.Rngs(0))
[43]:
# Define optimizer and learning rate schedule parameters
PATIENCE = 10
COOLDOWN = 5
FACTOR = 0.5
RTOL = 1e-4
ACCUMULATION_SIZE = 100
MAX_LR = 0.5e-3
MIN_LR = 0
MIN_SCALE = MIN_LR / MAX_LR
[44]:
# Set up optimizer with reduce-on-plateau schedule
nsteps = 10_000
nepochs = 5
multistep = 1
opt = optax.chain(
optax.adaptive_grad_clip(10.0),
optax.adamw(MAX_LR),
reduce_on_plateau(
patience=PATIENCE,
cooldown=COOLDOWN,
factor=FACTOR,
rtol=RTOL,
accumulation_size=ACCUMULATION_SIZE,
min_scale=MIN_SCALE,
),
)
if multistep > 1:
opt = optax.MultiSteps(opt, multistep)
optimizer = nnx.Optimizer(F_model, opt)
[45]:
# Restore the model from checkpoint if requested
if restore_model:
checkpointer = ocp.StandardCheckpointer()
abs_model = nnx.eval_shape(lambda: MLP(input_dim=2, hidden_dim=hidden_dim, rngs=nnx.Rngs(0)))
abs_state = nnx.state(abs_model)
# Orbax API expects a tree of abstract `jax.ShapeDtypeStruct`
# that contains both sharding and the shape/dtype of the arrays.
abs_state = jax.tree.map(
lambda a, s: jax.ShapeDtypeStruct(a.shape, a.dtype, sharding=s),
abs_state, nnx.get_named_sharding(abs_state, mesh)
)
loaded_sharded = checkpointer.restore(checkpoint_dir + '/v1',
target=abs_state)
graphdef, abstract_state = nnx.split(abs_model)
F_model = nnx.merge(graphdef, loaded_sharded)
checkpointer.close()
4. Training Loop#
This section defines the training and validation steps, and runs the training loop if enabled. Early stopping and learning rate scheduling are used for efficient training.
[46]:
# Set batch size for training
batch_size = 1024
[47]:
# Instantiate the diffusion path and loss function
path = EDMPath(scheduler=EDMScheduler())
loss_fn = path.get_loss_fn()
[48]:
# Generate validation data
val_data = inf_train_gen(jax.random.PRNGKey(1), 512)
[49]:
# Validation loss computation
@nnx.jit
def val_loss(model, key):
x_1 = val_data
sigma = path.sample_sigma(key, x_1.shape[0])
path_sample = path.sample(key, x_1, sigma)
batch = path_sample.get_batch()
loss = loss_fn(model, batch)
return loss
[50]:
# Training step function
@nnx.jit
def train_step(F_model, optimizer, batch):
grad_fn = nnx.value_and_grad(loss_fn)
loss, grads = grad_fn(F_model, batch)
optimizer.update(grads, value=loss) # In-place updates.
return loss
[51]:
# Import tqdm for progress bars and set early stopping flag
from tqdm import tqdm
early_stopping = True
[52]:
# Initialize training state and tracking variables
best_state = nnx.state(F_model)
best_val_loss_value = val_loss(F_model, jax.random.PRNGKey(0))
val_error_ratio = 1.1
counter = 0
cmax = 10
print_every = 100
loss_array = []
val_loss_array = []
rngs = nnx.Rngs(42)
[53]:
# Main training loop (runs only if train_model=True)
if train_model:
F_model.train()
for ep in range(nepochs):
pbar = tqdm(range(nsteps))
l = 0
v_l = 0
for j in pbar:
if counter > cmax and early_stopping:
print("Early stopping")
# restore the model state to the best found so far
graphdef, abstract_state = nnx.split(F_model)
F_model = nnx.merge(graphdef, best_state)
break
# Generate a batch of target data x_1 from the data generator
x_1 = inf_train_gen(rngs.train_step(), batch_size)
# Sample noise levels and create path sample
sigma = path.sample_sigma(rngs.train_step(), x_1.shape[0])
path_sample = path.sample(rngs.train_step(), x_1, sigma)
batch = path_sample.get_batch()
# Compute loss and update model parameters in-place
loss = train_step(F_model, optimizer, batch)
l += loss.item()
# Compute validation loss for early stopping and LR scheduling
v_loss = val_loss(F_model, rngs.val_step())
v_l += v_loss.item()
if j > 0 and j % 100 == 0:
# Compute average training and validation loss over the last 100 steps
loss_ = l / 100
val_ = v_l / 100
# Compute ratios for early stopping and best model tracking
ratio1 = val_ / loss_
ratio2 = val_ / best_val_loss_value
# If validation loss is not diverging, update best state if needed
if ratio1 < val_error_ratio:
if val_ < best_val_loss_value:
best_val_loss_value = val_
best_state = nnx.state(F_model)
elif ratio2 < 1.05:
best_state = nnx.state(F_model)
counter = 0
else:
counter += 1
# Update progress bar with current metrics
pbar.set_postfix(
loss=f"{loss_:.4f}",
ratio=f"{ratio1:.4f}",
counter=counter,
val_loss=f"{val_:.4f}",
)
loss_array.append(loss_)
val_loss_array.append(val_)
l = 0
v_l = 0
F_model.eval()
[54]:
# Save the trained model to checkpoint (if training was performed)
if train_model:
checkpointer = ocp.StandardCheckpointer()
model_state = nnx.state(F_model)
checkpointer.save(checkpoint_dir + '/v1', model_state)
checkpointer.close()
5. Sampling from the Model#
In this section, we sample trajectories from the trained diffusion model and visualize the results at different time steps.
sample the model#
[55]:
# Set model to evaluation mode before sampling
F_model.eval()
[56]:
# Sample trajectories from the model using SDE solver
nsteps = 30
norm = cm.colors.Normalize(vmax=50, vmin=0)
nsamples = 100_000 # batch size
key = jax.random.PRNGKey(0)
solver = SDESolver(score_model=F_model, path=path) # create an SDESolver class
x_init = path.sample_prior(key, (nsamples,2) ) # sample initial points from the prior distribution
samples = solver.sample(key, x_init, nsteps=nsteps, return_intermediates=True) # sample from the model
[27]:
# Visualize the sampled trajectories at different time steps
T = np.linspace(0, 29, 10, endpoint=True, dtype=int) # convert to numpy array
fig, axs = plt.subplots(1, len(T), figsize=(20,20))
for i,step in enumerate(T):
H = axs[i].hist2d(samples[step,:,0], samples[step,:,1], 300, range=((-5,5), (-5,5)))
cmin = 0.0
cmax = jnp.quantile(jnp.array(H[0]), 0.99).item()
norm = cm.colors.Normalize(vmax=cmax, vmin=cmin)
_ = axs[i].hist2d(samples[step,:,0], samples[step,:,1], 300, range=((-5,5), (-5,5)), norm=norm, cmap="viridis")
axs[i].set_aspect('equal')
axs[i].axis('off')
axs[i].set_title(f't={step/(nsteps-1):.2f}')
plt.tight_layout()
plt.show()

6. Marginal and Trajectory Visualization#
We visualize the marginal distributions and sample trajectories from the diffusion model.
[28]:
# Import plotting utilities for marginals and trajectories
from gensbi.utils.plotting import plot_trajectories, plot_marginals
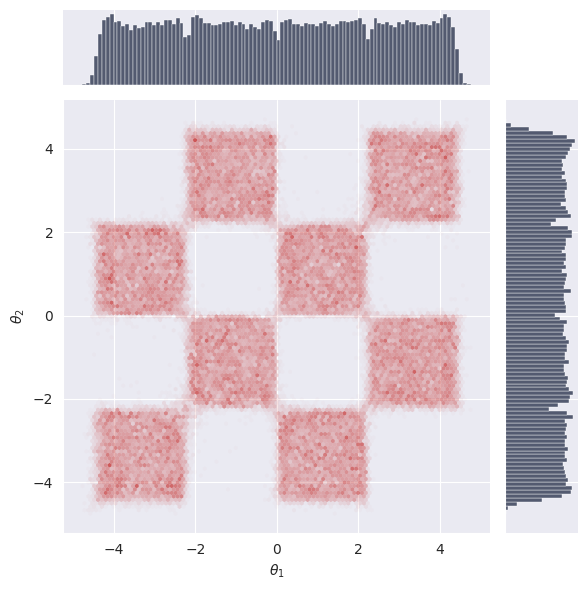
[29]:
# Plot the marginal distribution of the final samples
plot_marginals(samples[-1], plot_levels=False, gridsize=100)
plt.show()
[30]:
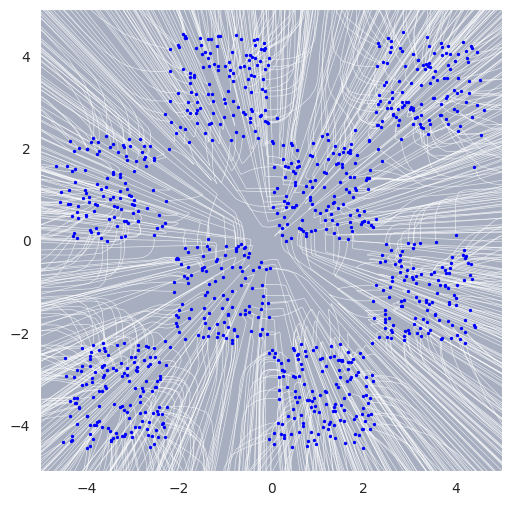
# Plot sampled trajectories
fig, ax = plot_trajectories(samples[:,:1000,:])
plt.xlim(-5, 5)
plt.ylim(-5, 5)
plt.grid(False)
plt.show()