Flow Matching 2D Unconditional Example#
![]()
This notebook demonstrates how to train and sample from a flow-matching model on a 2D toy dataset using JAX and Flax. We will cover data generation, model definition, training, sampling, and density estimation using the pipeline utility.
1. Environment Setup#
In this section, we set up the notebook environment, import required libraries, and configure JAX for CPU or GPU usage.
[1]:
# Load autoreload extension for development convenience
%load_ext autoreload
%autoreload 2
[2]:
try: #check if we are using colab, if so install all the required software
import google.colab
colab=True
except:
colab=False
[3]:
if colab: # you may have to restart the runtime after installing the packages
%pip install "gensbi_examples[cuda12] @ git+https://github.com/aurelio-amerio/GenSBI-examples"
!git clone https://github.com/aurelio-amerio/GenSBI-examples
%cd GenSBI-examples/examples
[4]:
# Set training and model restoration flags
overwrite_model = False
restore_model = False # Use pretrained model if available
train_model = True # Set to True to train from scratch
Library Imports and JAX Backend Selection#
[5]:
# Import libraries and set JAX backend
import os
os.environ['JAX_PLATFORMS']="cuda" # select cpu instead if no gpu is available
# os.environ['JAX_PLATFORMS']="cpu"
from flax import nnx
import jax
import jax.numpy as jnp
import optax
from optax.contrib import reduce_on_plateau
import numpy as np
# Visualization libraries
import matplotlib.pyplot as plt
from matplotlib import cm
[6]:
# Specify the checkpoint directory for saving/restoring models
import orbax.checkpoint as ocp
checkpoint_dir = f"{os.getcwd()}/checkpoints/flow_matching_2d_example_1c"
import os
os.makedirs(checkpoint_dir, exist_ok=True)
if overwrite_model:
checkpoint_dir = ocp.test_utils.erase_and_create_empty(checkpoint_dir)
2. Data Generation#
We generate a synthetic 2D dataset using JAX. This section defines the data generation functions and visualizes the data distribution.
[7]:
# Define a function to generate 2D box data using JAX
import jax
import jax.numpy as jnp
from jax import random
from functools import partial
import grain
@partial(jax.jit, static_argnums=[1]) # type: ignore
def make_boxes_jax(key, batch_size: int = 200):
"""
Generates a batch of 2D data points similar to the original PyTorch function
using JAX.
Args:
key: A JAX PRNG key for random number generation.
batch_size: The number of data points to generate.
Returns:
A JAX array of shape (batch_size, 2) with generated data,
with dtype float32.
"""
# Split the key for different random operations
keys = jax.random.split(key, 3)
x1 = jax.random.uniform(keys[0],batch_size) * 4 - 2
x2_ = jax.random.uniform(keys[1],batch_size) - jax.random.randint(keys[2], batch_size, 0,2) * 2
x2 = x2_ + (jnp.floor(x1) % 2)
data = 1.0 * jnp.concatenate([x1[:, None], x2[:, None]], axis=1) / 0.45
return data
[8]:
# # Infinite data generator for training batches
# @partial(jax.jit, static_argnums=[1]) # type: ignore
# def inf_train_gen(key, batch_size: int = 200):
# x = make_boxes_jax(key, batch_size)
# return x
data = make_boxes_jax(jax.random.PRNGKey(0), 500_000)
train_dataset_grain = (
grain.MapDataset.source(np.array(data)[...,None])
.shuffle(42)
.repeat()
.to_iter_dataset()
)
performance_config = grain.experimental.pick_performance_config(
ds=train_dataset_grain,
ram_budget_mb=1024 * 4,
max_workers=None,
max_buffer_size=None,
)
train_dataset_batched = train_dataset_grain.batch(512).mp_prefetch(
performance_config.multiprocessing_options
)
train_iter = iter(train_dataset_batched)
data_val = make_boxes_jax(jax.random.PRNGKey(1), 1000)
val_dataset_batched = (
grain.MapDataset.source(np.array(data_val)[...,None])
.shuffle(42)
.repeat()
.to_iter_dataset()
.batch(512)
)
[9]:
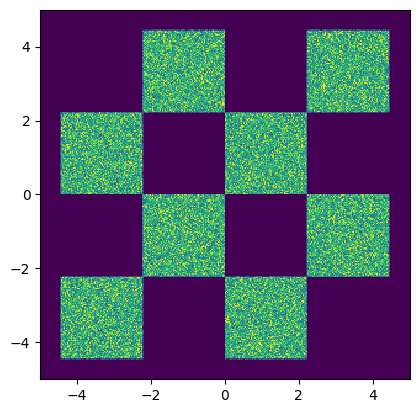
# Visualize the generated data distribution
samples = np.array(data)
H=plt.hist2d(samples[:,0], samples[:,1], 300, range=((-5,5), (-5,5)))
cmin = 0.0
cmax = jnp.quantile(jnp.array(H[0]), 0.99).item()
norm = cm.colors.Normalize(vmax=cmax, vmin=cmin)
_ = plt.hist2d(samples[:,0], samples[:,1], 300, range=((-5,5), (-5,5)), norm=norm, cmap="viridis")
# set equal ratio of axes
plt.gca().set_aspect('equal', adjustable='box')
plt.show()
3. Model and Loss Definition#
We define the velocity field model (an MLP), the loss function, and the optimizer for training the flow-matching model.
[10]:
# Import flow matching components and utilities
from gensbi.recipes import UnconditionalFlowPipeline
/home/zaldivar/miniforge3/envs/gensbi/lib/python3.12/site-packages/tqdm/auto.py:21: TqdmWarning: IProgress not found. Please update jupyter and ipywidgets. See https://ipywidgets.readthedocs.io/en/stable/user_install.html
from .autonotebook import tqdm as notebook_tqdm
[11]:
# Define the MLP velocity field model
class MLP(nnx.Module):
def __init__(self, input_dim: int = 2, hidden_dim: int = 128, *, rngs: nnx.Rngs):
self.input_dim = input_dim
self.hidden_dim = hidden_dim
din = input_dim + 1
self.linear1 = nnx.Linear(din, self.hidden_dim, rngs=rngs)
self.linear2 = nnx.Linear(self.hidden_dim, self.hidden_dim, rngs=rngs)
self.linear3 = nnx.Linear(self.hidden_dim, self.hidden_dim, rngs=rngs)
self.linear4 = nnx.Linear(self.hidden_dim, self.hidden_dim, rngs=rngs)
self.linear5 = nnx.Linear(self.hidden_dim, self.input_dim, rngs=rngs)
def __call__(self, t: jax.Array, obs: jax.Array, **kwargs):
assert obs.ndim == 3, f"Input obs must have shape (batch_size, input_dim, 1), got {obs.shape}"
t = jnp.atleast_1d(t)
x = jnp.squeeze(obs, axis=-1)
if t.ndim<2:
t = t[..., None]
t = jnp.broadcast_to(t, (x.shape[0], t.shape[-1]))
h = jnp.concatenate([x, t], axis=-1)
x = self.linear1(h)
x = jax.nn.gelu(x)
x = self.linear2(x)
x = jax.nn.gelu(x)
x = self.linear3(x)
x = jax.nn.gelu(x)
x = self.linear4(x)
x = jax.nn.gelu(x)
x = self.linear5(x)
return x[...,None]
[12]:
# Initialize the velocity field model
hidden_dim = 512
# velocity field model init
model = MLP(input_dim=2, hidden_dim=hidden_dim, rngs=nnx.Rngs(0))
training_config = UnconditionalFlowPipeline._get_default_training_config()
training_config["checkpoint_dir"] = checkpoint_dir
pipeline = UnconditionalFlowPipeline(model,
train_dataset_batched,
val_dataset_batched,
2,
training_config=training_config)
[13]:
# Restore the model from checkpoint if requested
if restore_model:
pipeline.restore_model()
[ ]:
model_params = nnx.state(pipeline.model, nnx.Param)
total_params = sum(np.prod(x.shape) for x in jax.tree_util.tree_leaves(model_params))
print(f"Total model parameters: {total_params}")
Total model parameters: 791042
The Kernel crashed while executing code in the current cell or a previous cell.
Please review the code in the cell(s) to identify a possible cause of the failure.
Click <a href='https://aka.ms/vscodeJupyterKernelCrash'>here</a> for more info.
View Jupyter <a href='command:jupyter.viewOutput'>log</a> for further details.
4. Training Loop#
This section defines the training and validation steps, and runs the training loop if enabled. Early stopping and learning rate scheduling are used for efficient training.
[14]:
if train_model:
# Train the model
pipeline.train(nnx.Rngs(0), nsteps=10_000)
100%|██████████| 10000/10000 [01:22<00:00, 120.64it/s, counter=0, loss=3.8101, ratio=1.0362, val_loss=3.9481]
Saved model to checkpoint
5. Sampling from the Model#
In this section, we sample trajectories from the trained flow-matching model and visualize the results at different time steps.
sample the model#
[15]:
key = jax.random.PRNGKey(42)
T = jnp.linspace(0,1,10) # sample times
sol = pipeline.sample(key, nsamples=500_000, time_grid=T)
[16]:
# Visualize the sampled trajectories at different time steps
sol = np.array(sol) # convert to numpy array
T = np.array(T) # convert to numpy array
fig, axs = plt.subplots(1, 10, figsize=(20,20))
for i in range(10):
H = axs[i].hist2d(sol[i,:,0], sol[i,:,1], 300, range=((-5,5), (-5,5)))
cmin = 0.0
cmax = jnp.quantile(jnp.array(H[0]), 0.99).item()
norm = cm.colors.Normalize(vmax=cmax, vmin=cmin)
_ = axs[i].hist2d(sol[i,:,0], sol[i,:,1], 300, range=((-5,5), (-5,5)), norm=norm, cmap="viridis")
axs[i].set_aspect('equal')
axs[i].axis('off')
axs[i].set_title('t= %.2f' % (T[i]))
plt.tight_layout()
plt.show()

6. Marginal and Trajectory Visualization#
We visualize the marginal distributions and sample trajectories from the model.
[17]:
# Import plotting utility for marginals
from gensbi.utils.plotting import plot_marginals
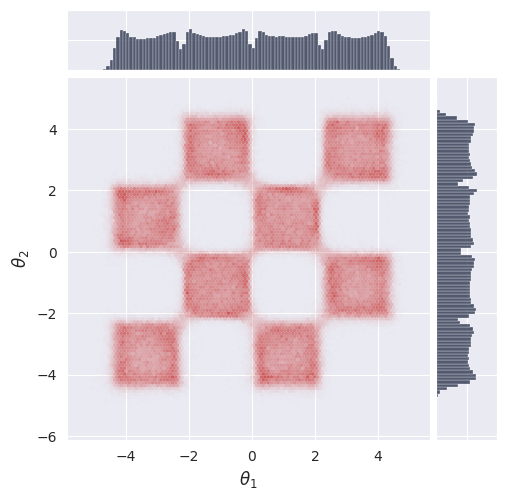
[18]:
# Plot the marginal distribution of the final samples
plot_marginals(sol[-1], plot_levels=False, gridsize=100, backend="seaborn")
plt.show()
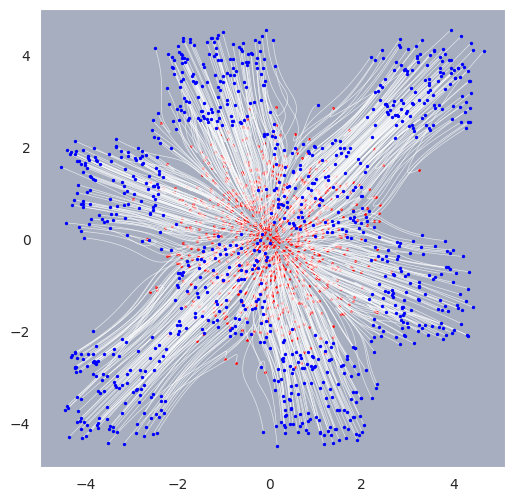
[19]:
# Sample and visualize trajectories with finer time resolution
batch_size = 1000
T = jnp.linspace(0,1,50) # sample times
sol = pipeline.sample(key, nsamples=batch_size, time_grid=T)
[20]:
# Import plotting utility for trajectories
from gensbi.utils.plotting import plot_trajectories
[21]:
# Plot sampled trajectories
fig, ax = plot_trajectories(sol)
plt.grid(False)
plt.show()
7. Likelihood Estimation#
This section demonstrates how to estimate and visualize the likelihood of the model on a grid of points in 2D space.
sample the likelihood#
[22]:
# Prepare grid for likelihood evaluation
grid_size = 200
x_1 = jnp.meshgrid(jnp.linspace(-5, 5, grid_size), jnp.linspace(-5, 5, grid_size))
x_1 = jnp.stack([x_1[0].flatten(), x_1[1].flatten()], axis=1)
[23]:
exact_log_p= pipeline.compute_unnorm_logprob(x_1, step_size=0.01, use_ema=True)
[24]:
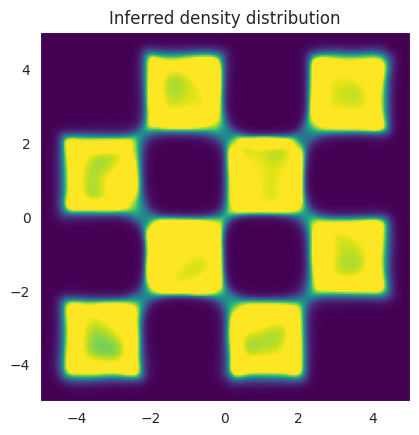
# Visualize the model likelihood on the 2D grid
likelihood = np.array(jnp.exp(exact_log_p[-1,:]).reshape(grid_size, grid_size))
cmin = 0
cmax = 1/40.5 # the domain goes from -4.5 to 4.5. The total area is (4.5*2)**2. Since only half of the area is covered by the data likelihood, we divide by 2 -> (4.5*2)**2 / 2 = 40.5. As Such 1/40.5 is the max theoretical likelihood value
norm = cm.colors.Normalize(vmax=cmax, vmin=cmin)
# Create the figure and axis objects explicitly
fig, ax = plt.subplots()
likelihood = np.array(jnp.exp(exact_log_p[-1,:]).reshape(grid_size, grid_size))
norm = cm.colors.Normalize(vmax=cmax, vmin=cmin)
im = ax.imshow(likelihood, extent=(-5, 5, -5, 5), origin='lower', cmap='viridis', norm=norm)
ax.set_title('Inferred density distribution')
plt.grid(False)
plt.show()